

Brief News of Cognitive Navigation (2017-001)
-
Neuroscience-inspired Data Compression
By Prof. Michael Milford Dec 21, 2017
- A project: An infinitely scalable learning and recognition network. The idea at the core of the project is to combine neuroscience and machine learning to develop new data compression techniques, inspired by the 2014 Nobel Prize-winning discoveryof the grid cell navigation system in the brain by Edvard Moser, May-Britt Moser and John O’Keefe, for a discovery made in 2004 / 2005.
- A bit of neuroscience and robotics history. Keywords: Place Cells, Head Direction Cells, RatSLAM, Pose Cells, Grid Cells, autonomous underground mining vehicles, memory, robot navigation, etc.
- A question. Why did the brain’s mapping system have one neuron representing hundreds or even thousands of different places in the world?
- A postdoc position. Pushing the boundaries on interdisciplinary, fundamental research related brain-inspired autonomous system. The role involves developing neuroscience-based machine learning systems to create highly compressible and scalable learning and recall systems for autonomous systems. In particular, they are modelling the multi-scale, periodic encoding properties of grid cells found in the mammalian brain to create sub-linear scaling mapping and localization systems, and then expanding these systems into other sensory domains including sound. The project has collaborative partners at Harvard and Uni Notre Dame in neuroscience, computer vision and machine learning. The role requires strong mathematical, machine learning, computer vision and large dataset processing skills, as well as paper writing and oral presentation experience.
More info on the Linkedin site.
-
Integration of grid maps in merged environments
- Natural environments are represented by local maps of grid cells and place cells that are stitched together.
- The manner by which transitions between map fragments are generated is unknown.
- The authors recorded grid cells while rats were trained in two rectangular compartments, A and B (each 1 m × 2 m), separated by a wall. Once distinct grid maps were established in each environment, they removed the partition and allowed the rat to explore the merged environment (2 m × 2 m).
- The grid patterns were largely retained along the distal walls of the box. Nearer the former partition line, individual grid fields changed location, resulting almost immediately in local spatial periodicity and continuity between the two original maps. Grid cells belonging to the same grid module retained phase relationships during the transformation.
- Thus, when environments are merged, grid fields reorganize rapidly to establish spatial periodicity in the area where the environments meet.
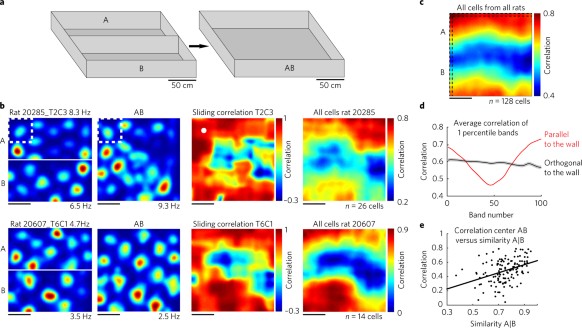
Fig. 1: Grid maps remain anchored to distal walls, but merge along the partition when the partition between two adjacent environments is removed.
More info on Nature Neuscience
Wernle T, Waaga T, Mørreaunet M, Treves A, Moser MB, Moser EI. Integration of grid maps in merged environments. Nature Neuroscience. 2017 Dec 11:1.
-
iNAV 2018: 2nd Interdisciplinary Navigation Symposium
HOW DOES THE BRAIN KNOW WHERE IT IS, WHERE IT IS GOING, AND HOW TO GET FROM ONE PLACE TO ANOTHER?
- In 2016, researchers from a variety of disciplines surrounding the cognitive neuroscience of navigation met in the Austrian mountains to discuss new discoveries, important unsolved questions in the field, and the way forward. This meeting was well attended and highly oversubscribed.
- The second iNAV meeting, to be held in June 2018 in Québec, Canada.
- As before, the meeting aims to bring together a diverse group of scientists from backgrounds such as systems neuroscience, human cognitive (neuro)science, animal behavior, theoretical neurobiology and robotics.
- The format for the meeting will be similar to the last meeting where there will be about 60 speakers giving 20 min presentations.
- There will be opportunities for everyone attending to either present a talk or a poster.
More info on the conference website