

ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM
Struckmeier, Oliver, Kshitij Tiwari, Martin J. Pearson, and Ville Kyrki. “ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM.” arXiv preprint arXiv:1904.05667 (2019).
Abstract— In this work, Struckmeier et al. propose a novel, bio-inspired multisensory SLAM approach called ViTa-SLAM. Compared to other multi-sensory SLAM variants, this approach allows for a seamless multi-sensory information fusion whilst naturally interacting with the environment. The algorithm is empirically evaluated in a simulated setting using a biomimetic robot platform called the WhiskEye. Our results show promising performance enhancements over existing bio-inspired SLAM approaches in terms of loop-closure detection.
The following content is extracted from the paper Struckmeier et al 2019.
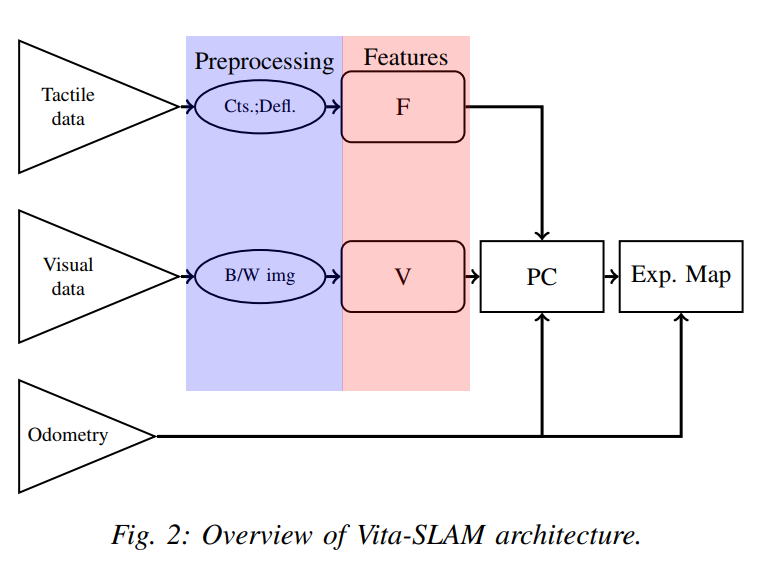
Fig. source: Struckmeier et al. 2019
Whilst the state-of-the-art bio-inspired SLAM model called RatSLAM was inspired by the rat hippocampal formations, it was designed purely for non-contact sensing scenarios. Similarly, WhiskerRatSLAM was designed purely for contact-sensing based SLAM. With this work, they have extended the outreach of these bio-inspired SLAM approaches to biomimetic robots bringing us one step closer to transitioning from biologically inspired to biologically plausible methodologies.
In the future works, they plan on extending our algorithm to higher dimensions to account for the full 6 DOF pose while the algorithm currently can handle upto 3 DOF pose. While this poses significant computational challenges, it is essential to generalizing the applicability of this method. Additionally, they will investigate active sensory switch mechanism to minimize rudimentary sensory data acquisition.
For further info, please read the paper Struckmeier et al. 2019.
Struckmeier, Oliver, Kshitij Tiwari, Martin J. Pearson, and Ville Kyrki. “ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM.” arXiv preprint arXiv:1904.05667 (2019).
Salman, Mohammed, and Martin J. Pearson. “Whisker-RatSLAM Applied to 6D Object Identification and Spatial Localisation.” In Conference on Biomimetic and Biohybrid Systems, pp. 403-414. Springer, Cham, 2018.