

How to represent large areas by reusing cells in 2D continuous attractor network model?
The excerpt note is about how to represent large areas by reusing cells in 2D continuous attractor network model in RatSLAM from Michael et al., 2008, 2010, and Samsonovich et al., 1997, McNaughton et al., 2006.
Michael Milford, and Gordon F. Wyeth. “Mapping a Suburb with a Single Camera using a Biologically Inspired SLAM System.” IEEE Transactions on Robotics 24, no. 5 (2008): 1038-1053.
Milford, Michael, and Gordon Wyeth. “Persistent Navigation and Mapping using a Biologically Inspired SLAM System.” The International Journal of Robotics Research 29, no. 9 (2010): 1131-1153.
A two dimensional continuous attractor model (CAN) can be used to represent place, which is modelled as a sheet of units, again with local excitation and global inhibition to form a spontaneous peak of activity. The peak can be moved by a mechanism of path integration system and reset by learnt associations with local view cells.
The wrap-around circular nature of the head direction network has also inspired a solution to make a two-dimensional network suitable for use over large areas (Samsonovich et al., 1997). If the network has boundaries, then the representation will fail when the rodent leaves the area covered by the network. However, if the network is configured so that each edge of the network is connected to the opposite side (forming a single toroidal surface), then the representation continues, with the reuse of cells in a tessellated pattern across the environment.
The pose cells form the core of the RatSLAM system. The pose cells represent the three degree of freedom (DoF) pose of the robot using a three-dimensional version of the CAN. Each face of the three-dimensional pose cell structure is connected to the opposite face with wraparound connections, as shown in fig. 1. In large environments during self-motion, activity wraps around the pose cell structure many times, resulting in firing fields (the locations in the environment at which the cell fires) that form a tessellating pattern similar to that of grid cells. Consequently, an individual pose cell can become associated with many different robot poses in physical space.
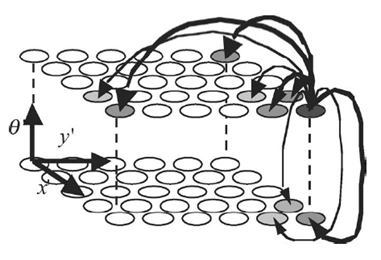
Fig.1 Continuous attractor network representation of the pose cells, with wraparound excitatory connections (arrows) in all three dimensions creating a stable activity packet (cell shading).
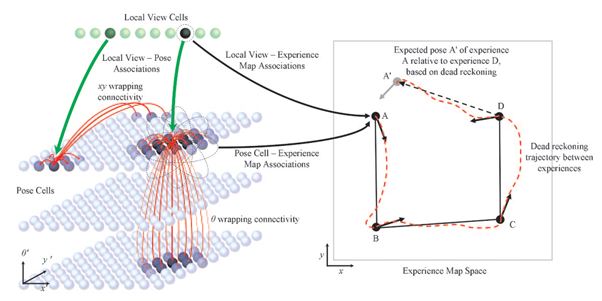
Fig.2 The RatSLAM system. Each local view cell is associated with a distinct visual scene in the environment, and becomes active when the robot sees that scene. A three-dimensional continuous attractor network forms the pose cells, where active pose cells encode the estimate of the robot’s pose. Each pose cell is connected to proximal cells by excitatory (arrows connecting pose cells) and inhibitory connections (not shown), with wrapping across all six faces of network. Intermediate layers in the  plane are not shown. The network connectivity leads to clusters of active cells known as activity packets. Active local view and pose cells drive the creation of experience nodes in the experience map, a semi-metric graphical representation of places in the environment and their interconnectivity.
plane are not shown. The network connectivity leads to clusters of active cells known as activity packets. Active local view and pose cells drive the creation of experience nodes in the experience map, a semi-metric graphical representation of places in the environment and their interconnectivity.
Activity in the pose cells is updated by self-motion cues, and calibrated by local view. The self-motion cues are used to drive path integration in the pose cells, while the external cues trigger local view cells that are associated with pose cells through associative learning. In this study, both the local view and self-motion cues are generated from camera images.
The role of the experience map is to organize the flow of information from the pose cells, the local view cells, and the self-motion cues into a set of related spatial experiences. An individual experience in the experience map is defined by the conjunction of the pattern of activity in the pose cells (the pose code) and the pattern of activity in the local view cells (the local view code). When either or both of the pose or local view codes change, a new experience if formed, and is linked to the previous experience by a transition that encodes the distance found from self-motion cues. New experiences and transitions will continue to form as the robot enters new areas. During loop closure, when the robot revisits a known area, the pose and local view codes are the same as in a previous experience. The experience mapping algorithm performs map correction by aligning the experience locations and orientations in the experience map with the transition information stored between the experiences.
The following content is about solving the boundary problem for the path integration network from McNaughton et al., 2006 and Samsonovich et al., 1997.
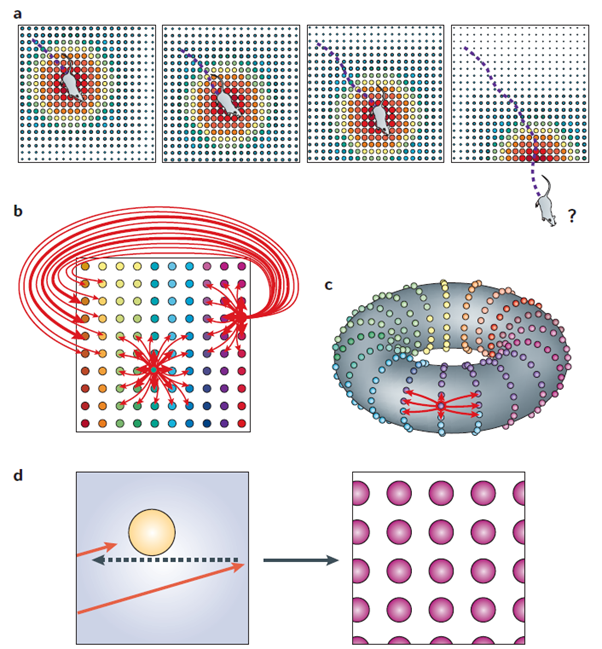
Fig.3 Solving the boundary problem for the path integration network.
a. The problem with a planar path integration system is that the size of the mapping space is limited by the number of cells. The rectangles represent a hypothetical ‘attractor map’ (or ‘chart’ (Samsonovich et al., 1997)) without periodicity in the synaptic matrix.
b. Each node represents a cell, and warm colours represent high firing rates. Samsonovich and McNaughton deal with the problem of edge effects in their path integrator model by postulating that the connections of cells at the edges wrapped around, creating a periodic boundary in two dimensions analogous to the periodic boundary condition of the head direction model. This gives rise to a synaptic matrix with a toroidal topology (c).
c. This solution solves the edge effect problem in terms of dynamics, but does not really solve the positional ambiguity problem because it predicts that, if the animal explores a large enough space, each place unit will be activated periodically, giving rise to (d) a rectangular distribution of place fields.
d. The red and black arrows represent the movement of the activity bump across the layer, and its reappearance at the opposite side with sufficient travel in one direction, due to the periodic connection matrix. The right panel illustrates the fact that, if the animal thoroughly explored a sufficiently large environment, a periodic matrix of this type would result in spatial firing fields that repeat at regular spatial intervals, giving rise to a square grid of activity maxima.
For further info, please read the following references.
Michael Milford, and Gordon F. Wyeth. “Mapping a Suburb with a Single Camera using a Biologically Inspired SLAM System.” IEEE Transactions on Robotics 24, no. 5 (2008): 1038-1053.
Milford, Michael, and Gordon Wyeth. “Persistent Navigation and Mapping using a Biologically Inspired SLAM System.” The International Journal of Robotics Research 29, no. 9 (2010): 1131-1153.
Samsonovich, Alexei, and Bruce L. McNaughton. “Path Integration and Cognitive Mapping in a Continuous Attractor Neural Network Model.” Journal of Neuroscience 17, no. 15 (1997): 5900-5920.
McNaughton, Bruce L., Francesco P. Battaglia, Ole Jensen, Edvard I. Moser, and May-Britt Moser. “Path Integration and the Neural Basis of the ‘Cognitive Map’.” Nature Reviews Neuroscience 7, no. 8 (2006): 663.