

How to represent robot’s pose with a rate-coded neural network CAN in RatSLAM?
The excerpt note is about robot’s pose representation with a rate-coded neural network, continuous attractor network (CAN) in RatSLAM from Michael and Gordon 2010.
The CAN is a neural network that consists of an array of units with fixed weighted connections that can be both excitatory and inhibitory. Unlike most neural network, the CAN predominantly operates by varying the activity of the neural units, rather than by changing the value of the weighted connections.
RatSLAM uses a rate-coded CAN, meaning that each neural unit has a continuous activation value between zero and one. The interpretation of the unit activation level is generally as a measure of a real biological cell’s firing rate; the higher the activation level, the faster the firing rate it represents.
In rodents, spatially responsive cells such as place cells fire fastest when the rat is located at a certain location, and reduce their firing rates as the rat moves away from this location. In RatSLAM, the activation value of a neural unit increases when the robot approaches a location associated with that neural unit.
During operation, the pose cell network will generally have a single cluster of highly active units: the activity packet. The center of the activity packet provides an estimate of the robot’s pose that can be determined from the pose cell network’s structure.
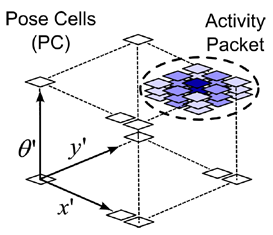
The pose cell network is arranged in a rectangular prism structure. Any three-dimensional structure can be used, but optimal configurations are those where the structure tessellates in all three dimensions, which simplifies the connectivity required across network boundaries. Each of the three dimensions of the network corresponds to one of the three spatial dimensions  ,
, and
and  . Primed coordinates are used to differentiate the space from that used with the experience map. The location of the active neural units in the rectangular prism structure correlates with the robot’s pose in
. Primed coordinates are used to differentiate the space from that used with the experience map. The location of the active neural units in the rectangular prism structure correlates with the robot’s pose in  .
.
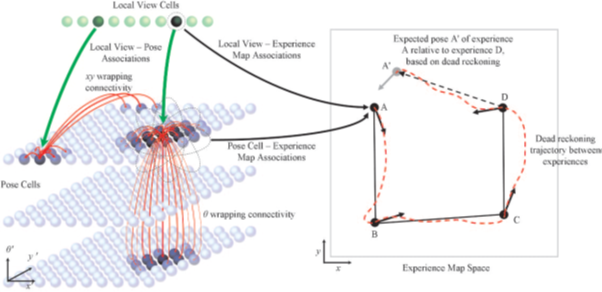
The RatSLAM system. The left part is Pose Cells Network
Michael Milford, and Gordon Wyeth. “Persistent Navigation and Mapping using a Biologically inspired SLAM System.” The International Journal of Robotics Research 29, no. 9 (2010): 1131-1153.