

How to perform Path Integration in RatSLAM?
The excerpt note is about path integration in RatSLAM from Michael et al. 2010, 2008, 2004.
The RatSLAM system uses poses cells to concurrently represent the beliefs about the location and orientation of the robot. By representing  in the same competitive attractor network, the system can concurrently manage several pose beliefs over time. This method also simplifies weight assignment for path integration. The advantage of a unified pose representation is that each cell encodes its own preferred orientation. This allows multiple hypotheses of the robot’s pose to propagate in different directions, unlike in a more convention head direction-place cell model.
in the same competitive attractor network, the system can concurrently manage several pose beliefs over time. This method also simplifies weight assignment for path integration. The advantage of a unified pose representation is that each cell encodes its own preferred orientation. This allows multiple hypotheses of the robot’s pose to propagate in different directions, unlike in a more convention head direction-place cell model.
The path integration process updates the pose cell activity profile by shifting activity based on robot translational and rotational velocity and the  co-ordinates of each pose cell. While a higher fidelity biological model would shift activity by using an appropriate set of weighted connections, RatSLAM simply displaces a copy of the current activity state by an amount based on nominal spatial areas and orientation bands of a pose cell. Copying and shifting activity offers stable path integration performance over a wider range of movement speeds and under irregular system iteration rates.
co-ordinates of each pose cell. While a higher fidelity biological model would shift activity by using an appropriate set of weighted connections, RatSLAM simply displaces a copy of the current activity state by an amount based on nominal spatial areas and orientation bands of a pose cell. Copying and shifting activity offers stable path integration performance over a wider range of movement speeds and under irregular system iteration rates.
Path integration is not meant to be strictly Cartesian; the distance and bearing relationships between units has only been partially tuned to assist in visualisation and weight assignment rather than to assist the function of the network. For example, each cell occupies approximately 0.25m x 0.25m in area and approximately  in bearing. The coarse nature of the pose cell representation means that path integration based on the pose cell network alone is far inferior to that achieved with simple odometric integration. It is the topological properties, and the relationship of pose to landmarks that maintains consistency and stability in the pose representation.
in bearing. The coarse nature of the pose cell representation means that path integration based on the pose cell network alone is far inferior to that achieved with simple odometric integration. It is the topological properties, and the relationship of pose to landmarks that maintains consistency and stability in the pose representation.
Many computational models of the rodent hippocampus achieve path integration by projecting existing cell activity to an anticipated future location, and allowing the competitive attractor network dynamics to shift the current activity towards this new activity. In a three-dimensional competitive attractor network it is difficult to achieve well-behaved path integration characteristics while still retaining suitable internal network dynamics. Consequently, a more pragmatic approach was taken with this extended hippocampal model.
The new path integration method shifts existing pose cell activity rather than projecting a copy of the current activity forwards in time. This process makes its performance independent of variable sensory update rates and robot velocity, and produces more accurate robot paths, as well as removing the need for parameter tuning. The method has no real biological basis, unlike other methods in more biologically faithful models (Arleo, Smeraldi et al. 2001; Stringer, Rolls et al. 2002).
The path integration process projects the pose cell activity into cells slightly offset from the currently activated ones. If the robot is translating, the activity is shifted in the x, y plane; if the robot is rotating, activity is shifted in the  direction. Under translation the direction of movement of activity is dependent upon the position of the cell in the
direction. Under translation the direction of movement of activity is dependent upon the position of the cell in the  direction. The magnitude of the movement in the x, y plane is dependent on the translational velocity, v. The movement along the
direction. The magnitude of the movement in the x, y plane is dependent on the translational velocity, v. The movement along the  axis is dependent on the rotational velocity,
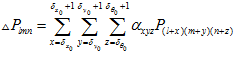
axis is dependent on the rotational velocity,  . Equation (1) shows the energy injected into each pose cell comes from a group of pose cells offset by the integer amounts
. Equation (1) shows the energy injected into each pose cell comes from a group of pose cells offset by the integer amounts  ,
,  and
and  . The amount of activity injected is based on the product of the activity of the sending unit,
. The amount of activity injected is based on the product of the activity of the sending unit,  , and a residue component,
, and a residue component,  . The residue component is spread over a
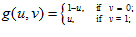
. The residue component is spread over a  cube to account the quantization effects of the grid representation. The residue is based on the fractional components of the offsets,
cube to account the quantization effects of the grid representation. The residue is based on the fractional components of the offsets,  ,
,  and
and  .
.
 (1)
(1)
Where  ,
,  and
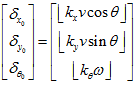
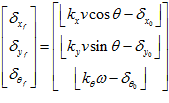
and  are path integration constants. The residue matrix
are path integration constants. The residue matrix  is calculated in Equation (2)
is calculated in Equation (2)
 (2)
(2)
For further more info, please read the Michael et al. 2010, 2008, 2004.
Michael Milford, and Gordon Wyeth. “Persistent Navigation and Mapping using a Biologically inspired SLAM System.” The International Journal of Robotics Research 29, no. 9 (2010): 1131-1153.
Michael Milford. Robot Navigation from Nature: Simultaneous Localisation, Mapping, and Path Planning Based on Hippocampal Models. Springer-Verlag Berlin Heidelberg Press, pp. 93-94, 2008.
Michael Milford, Gordon Wyeth, and David Prasser. “RatSLAM: a Hippocampal Model for Simultaneous Localization and Mapping.” In Robotics and Automation, 2004. Proceedings. ICRA’04. 2004 IEEE International Conference on, vol. 1, pp. 403-408. IEEE, 2004.