
Category: Bio-Inspired Robotics
Bio-inspired wind sensation for advanced autonomous drones/UAV navigation
Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved in autonomous applications. Accurate knowledge of position, attitude, and velocity is a critical input for drones operating in cluttered and challenging environments …
A Map in the Sky for Self-Flying Vehicles
A report titled ‘Flying Taxis Take Flight, Presage New Location Intelligence‘ by Frits van der Schaaf.
…Location intelligence has long been used to present real-time information on maps—for transportation companies’ tracking of shipments; utility companies’ monitoring the status
Robots are learning how to walk like we do
Robots have walked on legs for decades. Today’s most advanced humanoid robots can tramp along flat and inclined surfaces, climb up and down stairs, and slog through rough terrain. Some can even jump.
A report about legged robots on the …
AntBot: desert ants inspired autonomous navigation in outdoor environments
J. Dupeyroux et al. 2019 presents a navigation system inspired by desert ants’ navigation behavior, which requires precise and robust sensory modalities.
They tested several ant-inspired solutions to outdoor homing navigation problems on a legged robot using two optical sensors …
How a simple robotics model of mammal navigation is useful to interpret neurobiological recordings
Place recognition is a complex process involving idiothetic and allothetic information. In mammals, evidence suggests that visual information stemming from the temporal and parietal cortical areas (‘what’ and ‘where’ information) is merged at the level of the entorhinal cortex (EC) …
DeepMind GridCells Code
The DeepMind opens the code of grid cells (Banino et al 2018) via GitHub(https://github.com/deepmind/grid-cells) in Jan. 2019. This package provides an implementation of the supervised learning experiments in Vector-based navigation using grid-like representations in artificial agents, as published …
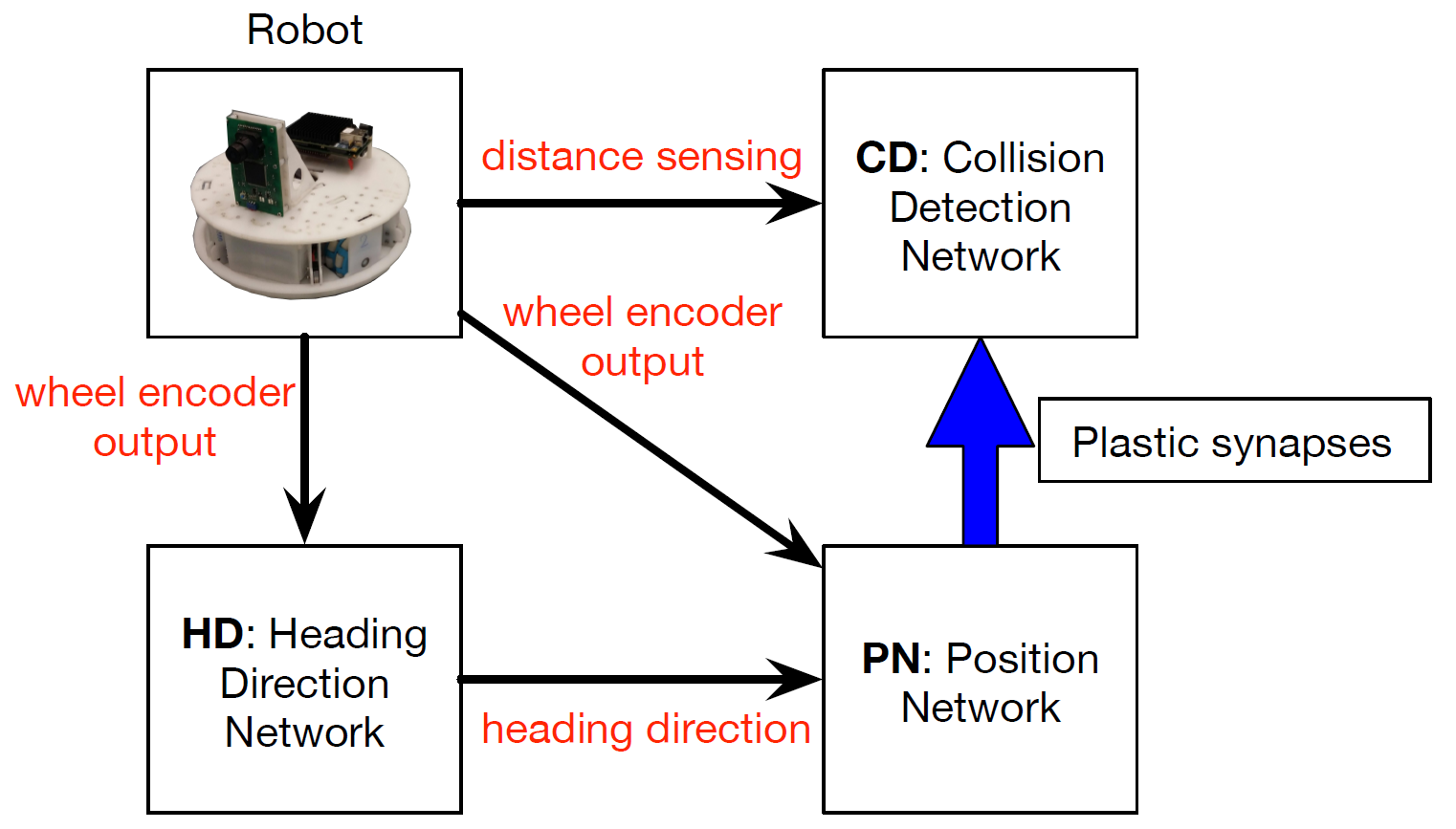
Towards Neuromorphic SLAM and Navigation
The latest research Kreiser et al. 2018, published IROS 2018, investigated the use of ultra low-power, mixed signal analog/digital neuromorphic hardware for implementation of biologically inspired neuronal path integration and map formation for a mobile robot.
For further info, please …
About
CogNav Blog
New discovery worth spreading on cognitive navigation in neurorobotics and neuroscience
Recent Posts
- How to build a bio-inspired hardware implementation of an analog spike-based hippocampus memory model?
- How does the brain select what to remember during sleep?
- How hippocampal activity encodes numerous memories of specific events in life?
- How egocentric coding properties arise from its presynaptic inputs, and how egocentric cells represent items across different behavioral contexts?
- How the medial entorhinal cortex develops during learning and influences memory?
Tags
Categories
- 3D Movement
- 3D Navigation
- 3D Path Integration
- 3D Perception
- 3D SLAM
- 3D Spatial Representation
- AI Navigation
- Bio-Inspired Robotics
- Brain-Inspired Navigation
- Cognitive Map
- Cognitive Navigation
- Episodic Memory
- Excerpt Notes
- Flying Vehicle Navigation
- Goal Representation
- Insect Navigation
- Learning to Navigate
- Neural Basis of Navigation
- Path Integration
- Path Planning
- Project
- Research Tips
- Robotic Vision
- Self-Flying Vehicles
- Spatial Cognition
- Spatial Cognitive Computing
- Spatial Coordinate System
- Spatial Memory
- Time
- Unclassified
- Visual Cortex
- Visual Cue Cells
Links
- Laboratory of Nachum Ulanovsky
- Jeffery Lab
- BatLab
- The NeuroBat Lab
- Taube Lab
- Laurens Group
- Romani Lab
- Moser Group
- O’Keefe Group
- DoellerLab
- MilfordRobotics Group
- The Space and Memory group
- Angelaki Lab
- Spatial Cognition Lab
- McNaughton Lab
- Conradt Group
- The Fiete Lab
- The Cacucci Lab
- The Burak Lab
- Knierim Lab
- Clark Spatial Navigation & Memory Lab
- Computational Memory Lab
- The Dombeck Lab
- Zugaro Lab
- Insect Robotics Group
- The Nagel Lab
- Basu Lab
- Spatial Perception and Memory lab
- The Neuroecology lab
- The Nagel Lab
- Neural Modeling and Interface Lab
- Memory and Navigation Circuits Group
- Neural Circuits and Memory Lab
- The lab of Arseny Finkelstein
- The Epstein Lab
- Gu Lab (Spatial Navigation and Memory)
- Fisher Lab (Neural Circuits for Navigation)
- The Alexander Lab (Spatial Cognition and Memory)
- Harvey Lab (Neural Circuits for Navigation)
- Buzsáki Lab
- ……