

【Latest Papers】Cognitive Navigation by Neuro-Inspired Localization, Mapping and Episodic Memory
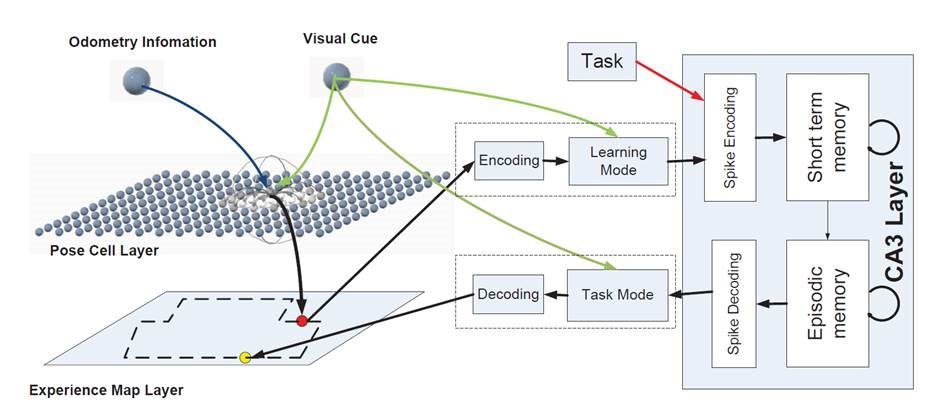 Abstract One of the important topics in the study of robotic cognition is to enable robot to perceive, plan and react to situations in a real-world environment. We present a novel angle on this subject, by integrating active navigation with sequence learning. We propose a neuro-inspired cognitive navigation model which integrates the cognitive mapping ability of entorhinal cortex (EC) and episodic memory ability of hippocampus to enable the robot to perform more versatile cognitive tasks. The EC layer is modeled by a 3D continuous attractor network (CAN) structure to build the map of the environment. The hippocampus is modeled by a recurrent spiking neural network to store and retrieve task-related information. The information between cognitive map and memory network are exchanged through respective encoding and decoding schemes. The cognitive system is applied on a mobile robot platform and the robot exploration, localization and navigation are investigated. The robotic experiments demonstrate the effectiveness of the proposed system.
Abstract One of the important topics in the study of robotic cognition is to enable robot to perceive, plan and react to situations in a real-world environment. We present a novel angle on this subject, by integrating active navigation with sequence learning. We propose a neuro-inspired cognitive navigation model which integrates the cognitive mapping ability of entorhinal cortex (EC) and episodic memory ability of hippocampus to enable the robot to perform more versatile cognitive tasks. The EC layer is modeled by a 3D continuous attractor network (CAN) structure to build the map of the environment. The hippocampus is modeled by a recurrent spiking neural network to store and retrieve task-related information. The information between cognitive map and memory network are exchanged through respective encoding and decoding schemes. The cognitive system is applied on a mobile robot platform and the robot exploration, localization and navigation are investigated. The robotic experiments demonstrate the effectiveness of the proposed system.
Huajin Tang ; Rui Yan ; Kay Chen Tan. Cognitive Navigation by Neuro-Inspired Localization, Mapping and Episodic Memory. IEEE Transactions on Cognitive and Developmental Systems. 2017 November 23: 99. DOI: 10.1109/TCDS.2017.2776965.