

基于Occupancy Grids的二维语义制图
基于Occupancy Grids的二维语义制图
2D Semantic Mapping on Occupancy Grids
近年来,学者们对室内矢量地图技术开展了大量研究工作,已经在许多方面得到了很好的应用。SLAM方法能够生成全局一致的矢量地图。尽管这样的地图描述了环境基本的信息并能够支持导航,但仍然缺乏环境的更高层抽象的语义信息或者人们认知的语义信息,例如建筑结构的类别、连通性等。本文中提出了一种新的概率方法基于全覆盖的网格图分析潜在的语义世界模型。该模型是由标准的SLAM方法所产生。文中的方法仿真了一种马尔可夫链从给定输入地图的语义世界模型概率分布产生样本。实验表明该方法是有效的,能够正确捕获到不确定性。
典型的语义概念,比如房间、走廊、空间关系(邻接、连通)、其他属性(如矩形)。这些语义信息有助于构建地图。虽然语义机器人制图没有像矢量或拓扑制图一样得到广泛研究,但也有一些重要的贡献。 文献【11】中的方法作为许多种语义制图方法的先驱,结合了网格和拓扑制图方法能够同时获得高精度、一致性的矢量图和有效拓扑图。 Wolf and Sukhatme [14] 提出了使用隐马尔可夫模型和支持向量机来解决地形制图和基于活动制图中所存在的问题。文献 [10], [2] 和 [3]利用语义标签来标注位置和区域。 Douillard等人提出使用条件随机场(conditional random fields)构建室外环境对象地图。此外,一些学者还提出了利用语义标注环境结构的方法,比如室外环境的道路(traversable terrain)、室内环境中的墙、天花板和门。比较典型的例子如[8], [12], [6] 和[9]。
In recent years, techniques for building metric maps of indoor environments have been intensely studied, and they perform very well in noumerous applications. Simultaneous Localization and Mapping (SLAM) methods produce globally consistent, metric maps of the explored environment. Although such maps describe how the environment looks like and can be used for navigation, there exist no abstracted semantic concepts that explain the environment on a higher level or in a more natural way (as we humans do), such as, what kind of structure and connectivity the environment possesses. In this paper, we propose a new probabilistic method to analyze the underlying semantic world model based on an occupancy grid map, which is generated by a standard SLAM process. Our approach simulates a Markov Chain that produces samples from the distribution of probable semantic world models given an input map. Experiments show that our approach is effective and correctly captures the uncertainty.
Typical semantic concepts, such as rooms and corridors, or spatial relations like adjacency, connectivity via doors, or properties like rectangularity that – if known to be relevant to the given environment – could help to build the maps in the first place. Although semantic robot mapping has not been as intensively studied as metric or topological mapping, some notable conbtributions have already been made. As an early predecessor of many semantic mapping approaches one might consider [11], which combined the grid-based and topological mapping to gain both of accuracy/consistency (metric) and efficiency (topological), the latter effectively by means of abstraction. Wolf and Sukhatme [14] proposed to use hidden Markov models and support vector machines to tackle the problem of terrain mapping and activity-based mapping. [10], [2] and [3] used semantic labels to annotate the places and regions explored by a mobile robot. Douillard et. al. proposed to use conditional random fields to build object-type maps of outdoor environments. Other examples of assigning semantic labels to perceived objects in the explored environments are presented in [7] and [13]. In addition, methods, which semantically annotate the structure of the environments, like traversable terrain in outdoor environments or walls, cellings and door in indoor environments, have also been proposed. Some remarkable examples are [8], [12], [6] and [9].
这种抽象模型类似于场景图,这种结构广泛应用在计算机图形学领域中。在例子中的图(如图1d所示)由房间和门组成,可以显示为一种经典的楼层平面图,如图1b所示。连通信息表示为一种拓扑图,如图1c所示,能够用于导航应用。
This abstract model has a form similar to a scene graph, a structure which is widely used in computer graphics. The graph (see Figure 1d) in our case consists of rooms and doorways connecting the rooms and can be visualized as a classical floor plan (see Figure 1b). As a by-product, the connectivity information is represented as a topological map (see Figure 1c) which is of great help for navigation purpose.
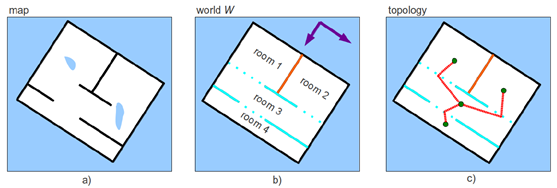
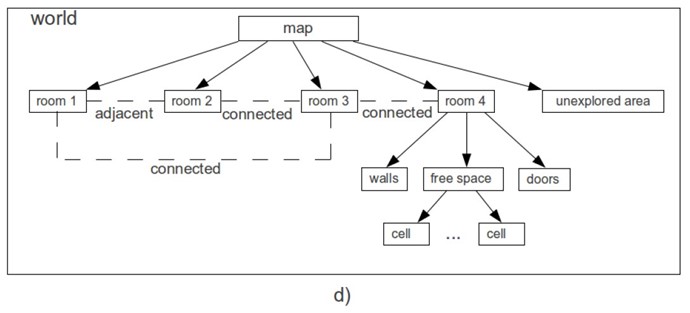
Figure 1: a) A simplified occupancy grid map: Unexplored area is drawn in blue, free space is drawn in white. Occupied area is drawn in black. b) A possible floor plan represented as a scene graph (W): The world is divided into four rooms and the corresponding unexplored area. Connectivity is given by the color of walls: the color cyan indicates connected, which means there is a door (cyan dotted) between two rooms; the color orange means adjacent, which means that two rooms are neighbor and do not connect themselves through a door; the color black stands for a boundary wall. The detected main orientations of walls are illustrated by violet arrows. c) The connectivity information represented as a topological map of world W: Green circles indicate room centers, and red lines connect the room centers and their corresponding doors. d) The semantic description of the world in form of the scene graph: Directed links connect nodes. The dashed lines indicate connectivity which is represented as a topological map in c). Like room 4, each room has three child nodes: walls, free space, and doors. Note that the lowest level of node in the tree structure is the grid cell that either belongs to a wall, free space or a door.
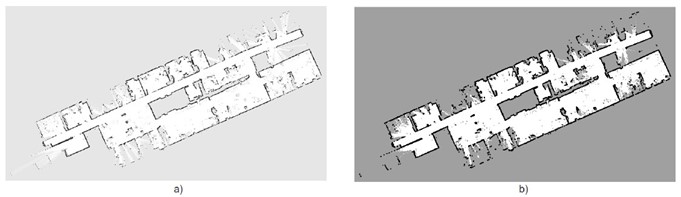
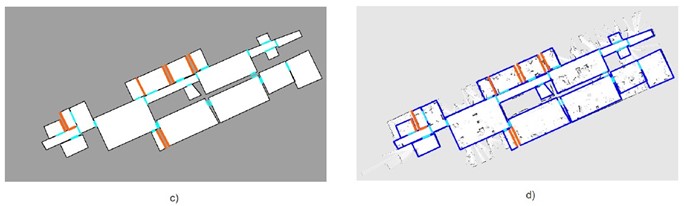

Figure 7: One example of an offline result. a) An occupancy grid map M [5]. b) The classified map CM with three intensity values (black=wall, grey=unexplored, white=free). c) The analyzed world W (black=boundary wall, orange=adjacent wall, gray=unknown, white=free, cyan=door). d) Boundary walls (blue), adjacent walls (orange) and doors (cyan) of the world W drawn into the map. e) Generate the topological map using the connectivity information. f) The resulting topological map (green circles=room centers).
Liu Z, Chen D, Von Wichert G. 2D Semantic Mapping on Occupancy Grids[C]// Robotics; Proceedings of ROBOTIK 2012; 7th German Conference onVDE, 2012:1-6.
[2] S. Friedman, H. Pasula, and D. Fox. Voronoi random fields: Extracting the topological structure of indoor environments via place labeling. In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2007.
[3] N. Goerke and S. Braun. Building semantic annotated maps by mobile robots. In Proceedings of the Conference Towards Autonomous Robotic Systems, Londonderry, UK, 2009.
[6] A.K. Krishnan and K.M. Krishna. A visual exploration algorithm using semantic cues that constructs image based hybrid maps. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1316 –1321, Oct. 2010.
[8] A. Nüchter and J. Hertzberg. Towards semantic maps for mobile robots. Robotics and Autonomous Systems, 56(11):915–926, 2008.
[9] M. Persson, T. Duckett, C. Valgren, and A. Lilienthal. Probabilistic semantic mapping with a virtual sensor for building/ nature detection. In International Symposium on Computational Intelligence in Robotics and Automation, pages 236 –242, June 2007.
[10] A. Pronobis, P. Jensfelt, K. Sjöö, H. Zender, G. M. Kruijff, O. M. Mozos, and W. Burgard. Semantic modelling of space. In Cognitive Systems, volume 8 of Cognitive Systems Monographs, pages 165–221. Springer Berlin Heidelberg, 2010.
[11] S. Thrun and A. Bücken. Integrating grid-based and topological maps for mobile robot navigation. In Proceedings of the AAAI Thirteenth National Conference on Artificial Intelligence, Portland, Oregon, 1996.
[12] Jingchen Tong, Dong Chen, Yan Zhuang, and Wei Wang. Mobile robot indoor semantic mapping using 3d laser scanning and monocular vision. In 8th World Congress on Intelligent Control and Automation (WCICA), pages 1212 –1217, July 2010.
[14] D.F. Wolf and G.S. Sukhatme. Semantic mapping using mobile robots. IEEE Transactions on Robotics, 24(2):245–258, 2008.